VISC Center, Purdue University, Indianapolis, USA Driving Video
Profile Dataset (DVP)

|
Driving Video Profile Dataset, Update 8/25/2022 Introduction |
Sample |
|||||||||||||||||||||||||||||||
|
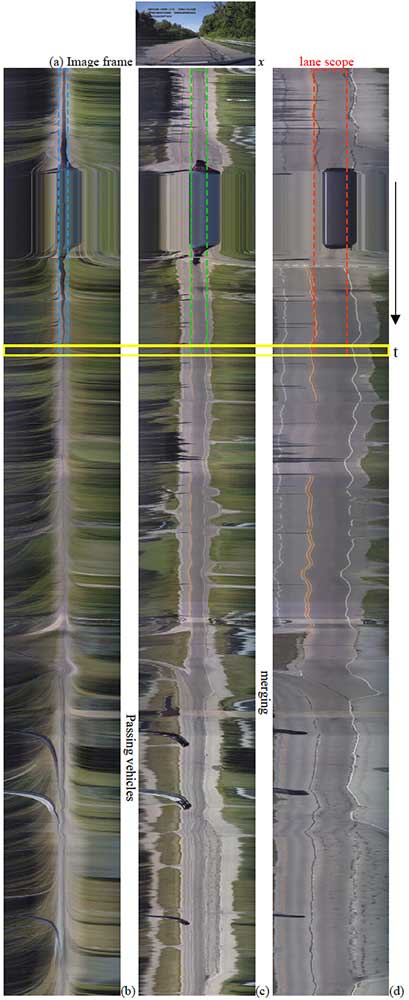
From a driving video, a road
profile and motion profile are extracted from a depth as spatial-temporal
images, in which road environment is displayed in a deformed 2D map and
dynamic objects show their trajectories [2]. With the temporal association
and dependency presented in the profiles, the road at the depth can be
located for vehicle path planning [5]. The vehicles as well as obstacles up
to that depth can be detected for braking to avoid collision. This dataset provides driving
video, road profile, and motion profile images for machine learning. The road
profiles are annotated pixel-wise in classes of road, off-road, vehicle,
pedestrian, vertical obstacle, lane mark, as well as slow driving periods
such as ego-vehicle stopping and sharp turning. Figure 1 shows an example of
such profile images. The road
profile (RP) data has been annotated pixel-wise for semantic segmentation.
Each driving video is sampled with horizontal lines at three depths ranging
from close, mid, to far. Three road profile images
and associated motion profiles are obtained through temporal scanning at the
lines. |
Video frame (a) at top and the road profiles from (b) far, (c) mid, and (d) close depths. Contributors Contributors:
Guo Cheng, Jiang Yu Zheng The credit
also gives to Dr. Yaobin Chen, Dr. Ranran Tian in TASI, IUPUI for providing source videos in
generating Road/Motion Profiles. Contact: jzheng@cs.iupui.edu (Jiang Yu Zheng) . |
|||||||||||||||||||||||||||||||
|
Dataset |
||||||||||||||||||||||||||||||||
|
Table I Road Profile Images, Motion
Profile Images, and Labeled Ground Truth from 60 driving videos
Table II Class colors in labeled
ground truth
Downloading
dataset for training and testing PNG images in a zipped file for training and testing. For
visualization, jpg images and videos are included as well for review, and HD
videos are downsized to 1/16th.
A readme.txt file indicates the categories of weather and
illumination. The heights of scanning lines for obtaining close, mid, and far
road profiles are 130, 80, 30 pixels respectively bellowed the horizon in the
video frames. Open Semantic Segmentation Code GitHub: https://github.com/BrookPurdueUniversity/Temporal-Shift-Memory Note: Including network in Patch-mode (trained and
inference in batch-mode), Naïve shift-mode (inference latest line
immediately), and TSM (minimum memory for latest line without latency). The
profiles are flipped in time dimension so that the time axis is upward for
visualization (different from the sample on the right of this paper). Duo to the zero padding added in TensorFlow
convolution on large (lower/right) side (i.e., a limitation of TensorFlow),
the TSM in Tensorflow will damage the data of the
latest input and thus ruin the entire segmentation accuracy. For this reason,
this profile flipping in the time domain will guarantee the outcome as
proposed network model in the paper [0]. This also allows the network to
learn the temporal order of data such that the later input is streamed into
the network from the small side. The
profile scanning outputs the latest result on small side of the network
including TSM, when the network shifts from bottom to top of the road profile
line by line. References Road profile semantic segmentation [0] G. Cheng, J. Y. Zheng,
“Sequential Semantic Segmentation of Road Profiles for Path and Speed
Planning”, IEEE Transaction on Intelligent Transportation Systems, pp.
1-14, 2022. [1] G. Cheng, J. Y. Zheng and M. Kilicarslan,
"Semantic Segmentation of Road Profiles for Efficient Sensing in
Autonomous Driving," 2019
IEEE Intelligent Vehicles Symposium (IV), 2019, pp. 564-569, doi: 10.1109/IVS.2019.8814259. Pedestrian
semantic segmentation in motion profiles [2] G. Cheng and J. Y. Zheng, "Semantic Segmentation for
Pedestrian Detection from Motion in Temporal Domain," 2020 25th
International Conference on Pattern Recognition (ICPR), 2021, pp. 6897-6903, doi: 10.1109/ICPR48806.2021.9411958. Vehicle
interactions in motion profiles [3] Z. Wang, J. Y. Zheng and Z. Gao, "Detecting Vehicle
Interactions in Driving Videos via Motion Profiles," 2020 IEEE
23rd International Conference on Intelligent Transportation Systems (ITSC), 2020, pp. 1-6, doi:
10.1109/ITSC45102.2020.9294617. [4]
M. Kilicarslan and J. Y. Zheng, "Predict
Vehicle Collision by TTC From Motion Using a Single Video Camera," in IEEE
Transactions on Intelligent Transportation Systems, vol. 20, no. 2, pp. 522-533, Feb. 2019, doi:
10.1109/TITS.2018.2819827. Weather
and illumination reflected in road profiles [5] Z. Wang, G. Cheng and J. Y. Zheng, "Road Edge Detection
in All Weather and Illumination via Driving Video Mining," in IEEE
Transactions on Intelligent Vehicles, vol. 4, no. 2, pp. 232-243,
June 2019, doi: 10.1109/TIV.2019.2904382. [6] G. Cheng, Z. Wang and J. Y. Zheng, "Modeling Weather
and Illuminations in Driving Views Based on Big-Video Mining," in IEEE
Transactions on Intelligent Vehicles, vol. 3, no. 4, pp. 522-533,
Dec. 2018, doi: 10.1109/TIV.2018.2873920. Initial
video profiles [7] M. Kilicarslan and J. Y. Zheng,
"Visualizing driving video in temporal profile," 2014 IEEE
Intelligent Vehicles Symposium Proceedings, 2014, pp. 1263-1269, doi: 10.1109/IVS.2014.6856420 |