Intelligent
Vehicles that Can See
Autonomous Driving based on AI
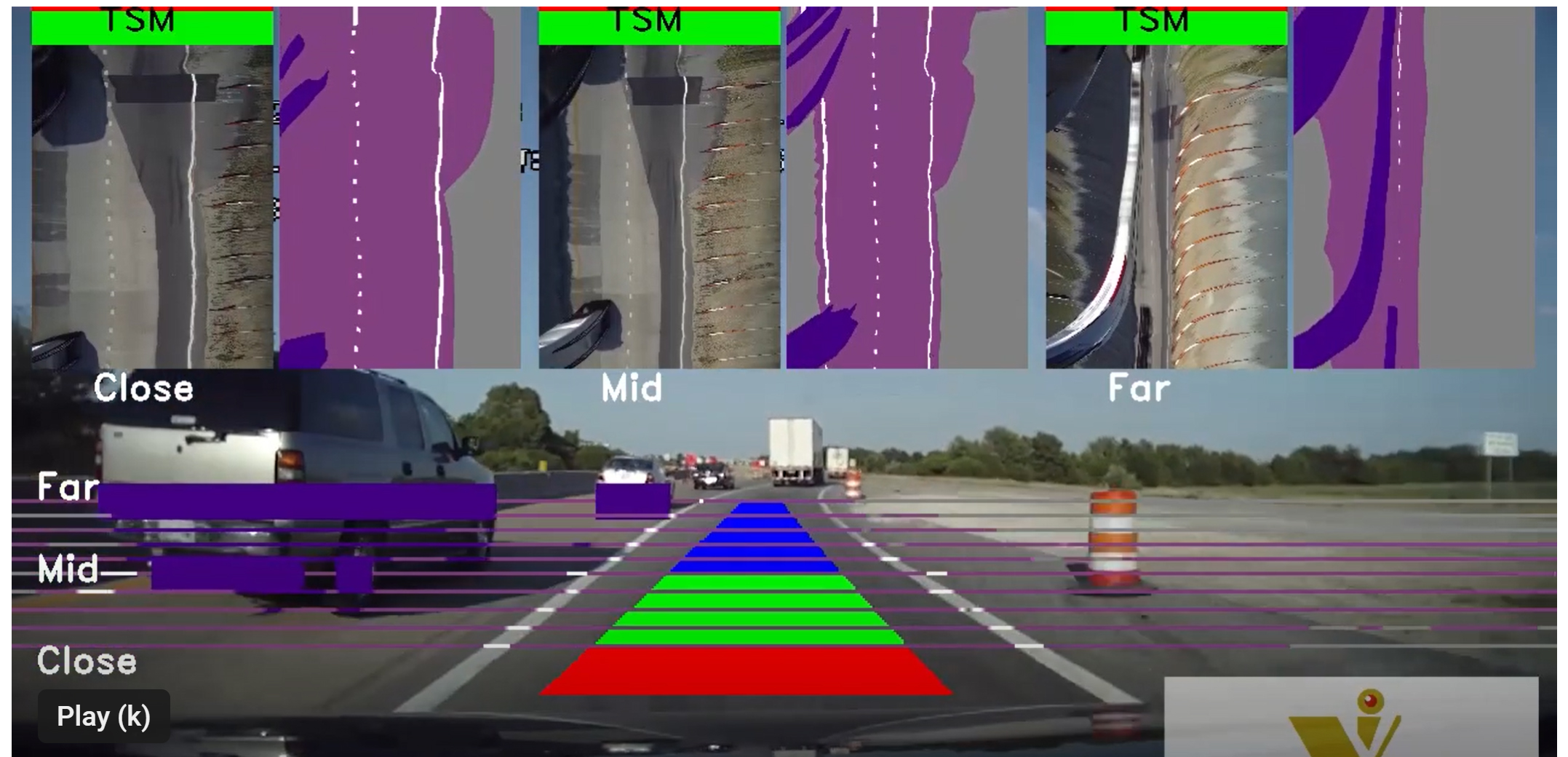
Deep Learning of Road Profiles from Driving Videos
 Driving video is available from
in-car camera for road detection and collision avoidance. However, consecutive
video frames in a large volume have redundant scene coverage during vehicle
motion, which hampers real-time perception in autonomous driving. This work
utilizes compact road profiles (RP) and motion profiles (MP) to identify path
regions and dynamic objects, which drastically reduces video data to a lower
dimension and increases sensing rate. To avoid collision in a close range and
navigate a vehicle in middle and far ranges, several RP/MPs are scanned
continuously from different depths for vehicle path planning. We train deep
network to implement semantic segmentation of RP in the spatial-temporal
domain, in which we further propose a temporally shifting memory for online testing.
It sequentially segments every incoming line without latency by referring to a
temporal window. In streaming-mode, our method generates real-time output of
road, roadsides, vehicles, pedestrians, etc. at discrete depths for path
planning and speed control. We have experimented our method on naturalistic
driving videos under various weather and illumination conditions. It reached
the highest efficiency with the least amount of data.
Driving video is available from
in-car camera for road detection and collision avoidance. However, consecutive
video frames in a large volume have redundant scene coverage during vehicle
motion, which hampers real-time perception in autonomous driving. This work
utilizes compact road profiles (RP) and motion profiles (MP) to identify path
regions and dynamic objects, which drastically reduces video data to a lower
dimension and increases sensing rate. To avoid collision in a close range and
navigate a vehicle in middle and far ranges, several RP/MPs are scanned
continuously from different depths for vehicle path planning. We train deep
network to implement semantic segmentation of RP in the spatial-temporal
domain, in which we further propose a temporally shifting memory for online testing.
It sequentially segments every incoming line without latency by referring to a
temporal window. In streaming-mode, our method generates real-time output of
road, roadsides, vehicles, pedestrians, etc. at discrete depths for path
planning and speed control. We have experimented our method on naturalistic
driving videos under various weather and illumination conditions. It reached
the highest efficiency with the least amount of data.
Publications:
G. Cheng, J. Y. Zheng, “Sequential Semantic
Segmentation of Road Profiles for Path and Speed Planning”, IEEE Transaction on Intelligent Transportation Systems, pp. 1-14, 2022. (Video)
G
Cheng, JY Zheng, M Kilicarslan, Semantic
segmentation of road profiles for efficient sensing in autonomous driving, 2019 IEEE
Intelligent Vehicles Symposium (IV), 564-569.
Dataset:
Driving Video Profile (DVP) dataset: www.cs.iupui.edu/~jzheng/drivingVideoProfile1.htm
Data Mining of Naturalistic
Driving Video (partly supported by Dept. of Transportation, and NIST.DOC)
Nowadays, many vehicles are equipped with a
vehicle borne camera system for monitoring drivers’ behavior, accident
investigation, road environment assessment, and vehicle safety design. Huge
amount of video data is being recorded daily. Analyzing and interpreting these
data in an efficient way has become a non-trivial task. As an index of video
for quick browsing, this work maps the video into a temporal image of reduced
dimension with as much intrinsic information as possible observed on the road.
The perspective projection video is converted to a top-view temporal profile
that has precise time, motion, and event information during the vehicle
driving. Then, we attempt to interpret dynamic events and environment around
the vehicle in such a continuous and compact temporal profile. The reduced
dimension of the temporal profile allows us to browse the video intuitively and
efficiently.
Publications:
Z. Wang, J. Y.
Zheng, Z. Gao, Detecting Vehicle Interactions in Driving Videos via Motion
Profiles, IEEE Intelligent Transportation System Conference, 2020, 1-6.
K. Kolcheck, Z.
Wang, H. Xu, J. Y. Zheng, Visual Counting of Traffic Flow from a Car via
Vehicle Detection and Motion Analysis, Asian Conference on Pattern Recognition,
2019, 529-543. (Best Paper Award on Road and Safety).
G. Cheng, J. Y. Zheng, H. Murase, Sparse
Coding of weather and illuminations for ADAS and autonomous driving, IEEE
Intelligent Vehicles, 2018, 1-6.
Guo Cheng, Z. Wang, J. Y. Zheng,
Modeling weather and illuminations in driving views based on big-video mining,
IEEE Trans. Intelligent Vehicles, 3(4), 522-533, 2018.
Mehmet
Kilicarslan, Jiang Yu Zheng, Visualizing Driving Video in Temporal Profile, IEEE
Intelligent Vehicle Symposim, 2014, 1-7.
Dataset:
J.Y. Zheng,
IUPUI Driving Videos and Images in All Weather and Illumination Conditions, CDVL Tech Memo, https://arxiv.org/abs/2104.08657
Pedestrian Detection from Motion
in Driving Video
Pedestrian detection has been
intensively studied based on appearances for driving safety. Only a few works
have explored between-frame optical flow as one of features for human
classification. In this paper, however, a new point of view is taken to watch a
longer period for non-smooth movement. We explore the pedestrian detection
purely based on motion, which is common and intrinsic for all pedestrians
regardless of their shape, color, background, etc. We found unique motion
characteristics of humans different from rigid object motion caused by vehicle
motion.
Publications:
M. Kilicarslan
and J. Y. Zheng, "DeepStep: Direct Detection of Walking Pedestrian From
Motion by a Vehicle Camera," in IEEE Transactions on Intelligent
Vehicles, 2022, doi:
10.1109/TIV.2022.3186962. (video)
G. Cheng, J. Y.
Zheng, Semantic Segmentation for Pedestrian Detection from Motion in Temporal
Domain, International Conference on Pattern Recognition 2020, 1-7. (Video)
M. D. Sulistiyo, Y. Kawanishi, D. Deguchi, I.
Ide, T. Hirayama, J. Y. Zheng, H. Murase, Attribute-Aware Loss Function for Accurate Semantic
Segmentation Considering the Pedestrian Orientations, IEICE
Trans. on Fundamentals of Electronics Communications and Computer
Sciences E103.A(1): 231-242, 2020.
M. D. Sulpizio, Y. Kawanishi, D.
Deguchi, T. Hirayama, I. Ide, J. Y. Zheng, H. Murase, Attribute-aware semantic
segmentation of road scenes for understanding pedestrian orientations, IEEE
Intelligent Transportation Systems Conference, 2018, 1-6.
M. Kilicarslan, J. Y. Zheng, K.
Raptis, Pedestrian detection from motion, 23th International Conference on
Pattern Recognition, 1857-1863, 2016. (video)
Mehmet Kilicarslan, Jiang Yu
Zheng, Aied Algarni, Pedestrian detection from non-smooth motion, IEEE
Intelligent Vehicles Symposium (IV), 2015, pp. 487-492
Mehmet Kilicarslan, Jiang Yu
Zheng, Detecting walking pedestrians from leg motion in driving video, 2014
IEEE 17th International Conference on Intelligent Transportation Systems
(ITSC), pp. 2924-2929

Bicyclists Detection in Driving Video
(supported by Toyota)
Monocular camera based bicyclist detection
in naturalistic driving video is a very challenging problem due to the high
variance of the bicyclist appearance and complex background of naturalistic
driving environment. In this paper, we propose a two-stage multi-modal
bicyclist detection scheme to efficiently detect bicyclists with varied poses
for further behavior analysis. A new motion based region of interest (ROI)
detection is first applied to the entire video to refine the region for
sliding-window detection. Then an efficient integral feature based detector is
applied to quickly filter out the negative windows. Finally, the remaining
candidate windows are encoded and tested by three pre-learned pose-specific
detectors. The experimental results on our TASI 110 car naturalistic driving dataset
show the effectiveness and efficiency of the proposed method. The proposed
method outperforms the traditional methods.
Publications:
C. Liu, R. Fujishiro, L.
Christopher, J. Y. Zheng, Vehicle-bicyclist dynamic position extracted from
naturalistic driving videos, IEEE Transactions on Intelligent Transportation
Systems, 18(4), 734-742, 2017.
Kai Yang, Chao Liu, Jiang Yu
Zheng, Lauren Christopher, Yaobin Chen, Bicyclist detection in large scale
naturalistic driving video, 2014 IEEE 17th International Conference on
Intelligent Transportation Systems (ITSC), 2015, pp. 1638-1643.
Vehicle Collision Alert based on
Visual Motion
This work models various
dangerous situations that may happen to a driving vehicle on road in
probability, and determines how such events are mapped to the visual field of
the camera. Depending on the motion flows detected in the camera, our algorithm
will identify the potential dangers and compute the time to collision for
alarming. The identification of dangerous events is based on the
location-specific motion information modeled in the likelihood probability
distributions. The originality of the proposed approach is at the location
dependent motion modeling using the knowledge of road environment. This will
link the detected motion to the potential danger directly for accident
avoidance. The mechanism from visual motion to the dangerous events omits the
complex shape recognition so that the system can response without delay.
Publications:
M. Kilicarslan, J. Y. Zheng, Predict collision by TTC
from motion using single camera, IEEE Trans. Intelligent Transportation Systems, 20(2), 522-533, 2019.
(video)
M.
Kilicarslan, J. Y. Zheng, Direct vehicle collision detection from motion in
driving video, IEEE Intelligent Vehicles, 2017, 1558-1564.
M.
Kilicarslan, J. Y. Zheng, Bridge motion to collision alarming using driving
video, 23th International Conference on Pattern Recognition, 1870-1875, 2016.
Mehmet Kilicarslan, Jiang Yu Zheng, Modeling Potential Dangers in Car Video for Collision
Alarming, IEEE International Conference on Vehicle Electronics and
safety 2012, 1-6
Mehmet Kilicarslan, Jiang Yu Zheng, Towards Collision Alarming
based on Visual Motion. IEEE International Conference on Intelligent
Transportation Systems 2012: 1-6
A. Jazayeri, H. Cai, J. Y. Zheng,
M. Tuceryan, Vehicle Detection and Tracking in Car
Video Based on Motion Model, IEEE Transaction on Intelligent
Transportation Systems, 12(2), 583-595, 2011.
Road Appearances and Edge
Detection in All-weathers and Illuminations (partly supported by Toyota)
To avoid vehicle running off road, road edge
detection is a fundamental function. Current work on road edge detection has
not exhaustively tackled all weather and illumination conditions. We first sort
the visual appearance of roads based on physical and optical properties under
various illuminations. Then, data mining approach is applied to a large driving
video set that contains the full spectrum of seasons and weathers to learn the
statistical distribution of road edge appearances. The obtained parameters of
road environment in color on road structure are used to classify weather in
video briefly, and the corresponding algorithm and features are applied for
robust road edge detection. To visualize the road appearance as well as
evaluate the accuracy of detected road, a compact road profile image is generated
to reduce the data to a small fraction of video. Through the exhaustive
examination of all weather and illuminations, our road detection methods can
locate road edges in good weather, reduce errors in dark illuminations, and
report road invisibility in poor illuminations.
Publications:
G. Cheng, J. Y. Zheng, M.
Kilicarslan, Semantic Segmentation of road profiles for efficient sensing in
autonomous driving, IEEE Intelligent Vehicle Symposium 2019, 1-6.
Z. Wang, G. Cheng, J. Y. Zheng,
Road edge detection in all weather and illumination via driving video mining,
IEEE Trans. Intelligent Vehicles, 4(2), 232-243, March 2019.
Guo Cheng, Z. Wang, J. Y. Zheng,
Modeling weather and illuminations in driving views based on big-video mining,
IEEE Trans. Intelligent Vehicles, 3(4), 522-533, 2018.
Z.
Wang, G. Cheng, J. Y. Zheng, All weather road edge identification based on
driving video mining. IEEE Intelligent Transportation Systems Conference, 2017.
G.
Cheng, Z. Wang, J. Y. Zheng, Big-video mining of road appearances in full
spectrums of weather and illuminations, IEEE Intelligent Transportation Systems
Conference, 2017.
Night Road and Illuminations
(Supported by Toyota)
Pedestrian Automatic Emergency
Braking (PAEB) for helping avoiding/mitigating pedestrian crashes has been
equipped on some passenger vehicles. Since approximately 70% pedestrian crashes
occur in dark conditions, one of the important components in the PAEB
evaluation is the development of standard testing at night. The test facility
should include representative low-illuminance environment to enable the
examination of the sensing and control functions of different PAEB systems. The
goal of this research is to characterize and model light source distributions
and variations in the low-illuminance environment and determine possible ways
to reconstruct such an environment for PAEB evaluation. This paper describes a
general method to collect light sources and illuminance information by
processing large amount of potential collision locations at night from naturalistic
driving video data. This study was conducted in four steps. (1) Gather night
driving video collected from Transportation Active Safety Institute (TASI) 110
car naturalistic driving study, particularly emphasizing locations with
potential pedestrian collision. (2) Generate temporal video profile as a
compact index toward large volumes of video, (3) Identify light fixtures by
removing dynamic vehicle head lighting in the profile and stamp them with their
Global Positioning System (GPS) coordinates. (4) Find the average distribution
and intensity of illuminants by grouping lighting component information around
the potential collision locations. The resulting lighting model and setting can
be used for lighting reconstruction at PAEB testing site.
Publications:
Libo Dong, Stanley Chien,
Jiang-Yu Zheng, Yaobin Chen, Rini Sherony, Hiroyuki Takahashi, Modeling of Low
Illuminance Road Lighting Condition Using Road Temporal Profile, SAE Technical
Paper, 2016, pp. 1638-1643
Railway Online
A patrol type of
surveillance has been performed everywhere from police city patrol to railway
inspection. Different from static cameras or sensors distributed in a space,
such surveillance has its benefits of low cost, long distance, and efficiency
in detecting infrequent changes. However, the challenges are how to archive
daily recorded videos in the limited storage space and how to build a visual
representation for quick and convenient access to the archived videos. We
tackle the problems by acquiring and visualizing route panoramas of rail
scenes. We analyze the relation between train motion and the video sampling and
the constraints such as resolution, motion blur and stationary blur etc. to
obtain a desirable panoramic image. The route panorama generated is a continuous
image with complete and non-redundant scene coverage and compact data size,
which can be easily streamed over the network for fast access, maneuver, and
automatic retrieval in railway environment monitoring. Then, we visualize the
railway scene based on the route panorama rendering for interactive navigation,
inspection, and scene indexing.
Publications:
S. Wang, S. Luo, Y. Huang, J. Y. Zheng, P. Dai, Q. Han, Railroad
online: acquiring and visualizing route panoramas of railway scenes. The Visual
Computer 30(9), 1045-1057, 2014.
S. Wang, S. Luo, Y. Huang, J.Y.
Zheng, P. Dai, Q. Han, Rendering railway scenes in Cyberspace based on route
panoramas, International Conference on Cyberworlds (CW), 12-19, 2013.
S. Wang, J. Y. Zheng, Y. Huang, S. Luo, Route panorama
acquisition and rendering for high-speed railway monitoring, IEEE International
Conference on Multimedia and Exposition, 1-6, 2013.